


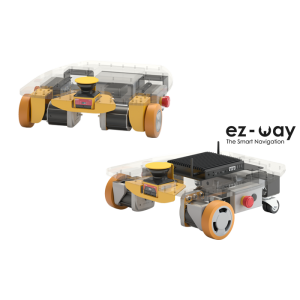












ez-Way®, LOGICIEL DE NAVIGATION POUR ROBOTS MOBILES CUSTOMS
ez-Way® est un logiciel de contrôle et de navigation pour robots mobiles, garantissant un fonctionnement fluide et efficace.
Installé sur chaque machine, il assure la gestion du robot mobile, la localisation du robot, la navigation et l’exécution des missions.


MISSION
Véritable accélérateur du développement de vos robots mobiles, ez-Way® facilite leur intégration et leur déploiement.
POINTS CLÉS
[+] Rend les plateformes équipées des produits SWD® autonomes
[+] Se connecte aux gestionnaires de flotte et d’usine via l’API VDA 5050
[+] Combine plusieurs modes : navigation libre, suivi de ligne, manuel
APPLICATIONS
- AGVs & AMRs
- Plateformes mobiles industrielles
- Robots intralogistiques








CONTRÔLE ET CONNECTIVITÉ
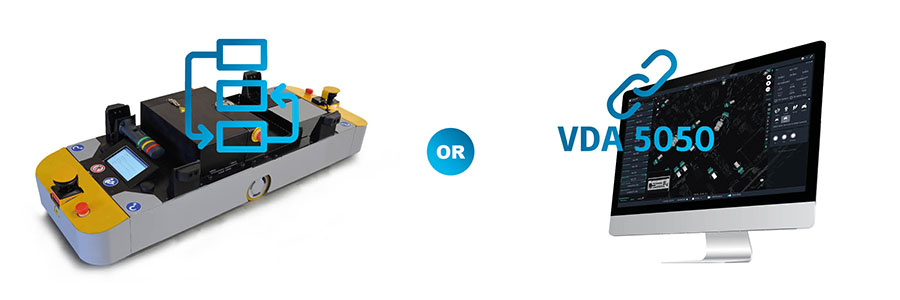
ez-Way® MANAGER STANDALONE
Les robots mobiles équipés d’ez-Way® peuvent être utilisés en mode Standalone lorsqu’un gestionnaire de flotte n’est pas requis.
- Gestionnaire local de mission
- Contrôle d’accès utilisateurs
(OU) GESTION DE FLOTTE PAR UN TIERS (SERVEUR)
Les robots mobiles équipés d’ez-Way® peuvent être contrôlés à partir de n’importe quel système de gestion de flotte tiers conforme à la norme VDA 5050.
- Disponible auprès de plusieurs players
- Compatible avec le VDA 5050*
- Adapté aux flottes hétérogènes d’AGVs
ez-Way® CONTRÔLE ET NAVIGATION (ROBOTS)
- Gestion du hardware (contrôle & surveillance)
- Localisation et gestion des capteurs
- Navigation (guidée, suivi de ligne)
ez-Way® GESTION DE MISSION
- Missions et tâches (déplacer, charger, attendre...)
- État du robot (position, niveau de charge, erreur...)
- Modification de cartes et création de missions personnalisées

*La norme VDA 5050 permet de connecter des véhicules autonomes dans l’industrie. Elle définit les règles de communication entre les robots et les systèmes de gestion.
MODES DE NAVIGATION
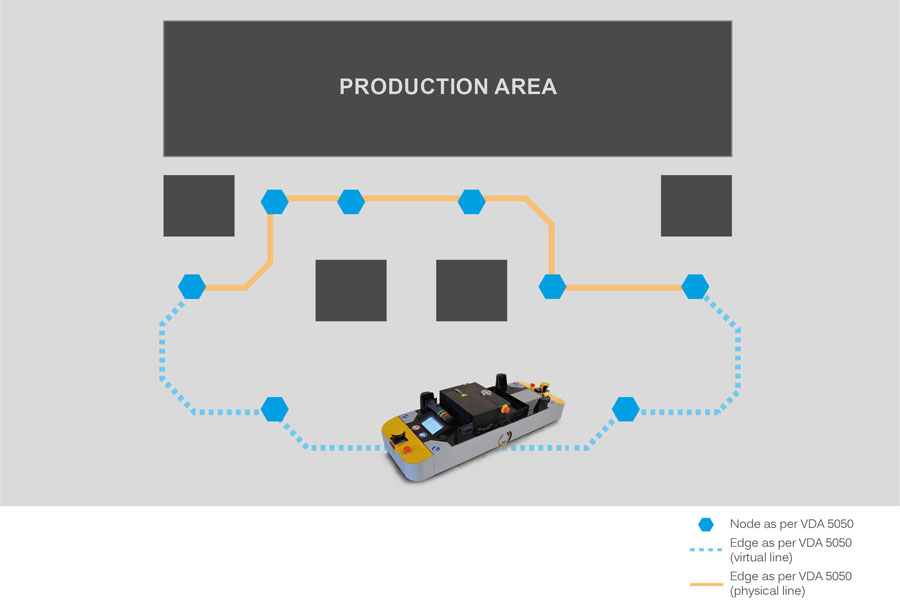
SUIVI DE LIGNE VIRTUELLE
- Navigation basée sur une carte
- Localisation basée sur le SLAM
- Utilisation des données du (des) LiDAR(s) de sécurité
- Trajectoire définie dans le FMS
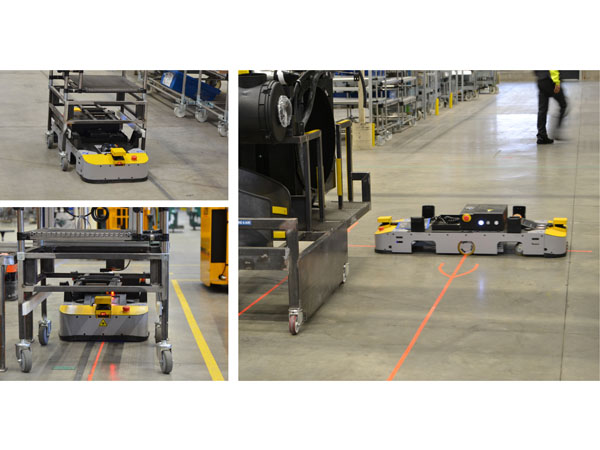
SUIVI DE LIGNE PHYSIQUE
- Mode de suivi de ligne réelle
- Lignes et tags magnétiques ou optiques
- Utilisation des données d’un capteur dédié
- Trajectoire définie par l’infrastructure
NAVIGATION EN MODES COMBINÉS
- Suivi de ligne virtuelle / physique
- Peut être sélectionnée pour chaque trajectoire
- Gestion multicapteurs intégrée
- Trajectoire définie dans le FMS
Pour tout besoin spécifique, des actions personnalisées peuvent être définies afin d’adapter les fonctionnalités du robot à chaque cas d’usage.