














ez-Way®, NAVIGATIONSSOFTWARE FÜR MOBILE ROBOTER
ez-Way® ist eine Software zum Steuern und Navigieren mobiler Roboter für einen reibungslosen und effizienten Betrieb.
Auf jeder einzelnen Maschine installiert, gewährleistet diese Software eine operative Funktionsweise, Roboterlokalisierung, Navigation und Aufgabenausführung.

MISSION
ez-Way® beschleunigt die Entwicklung mobiler Roboter durch eine optimierte Bereitstellung erweiterter Roboter-Fähigkeiten.
SCHLÜSSELPUNKTE
[+] Macht Plattformen mit SWD®-Produkten autonom
[+] Verbindet Flotten- und Werksmanager über API VDA 5050
[+] Kombiniert mehrere Modi: freie Navigation, Linienverfolgung, manuell
HAUPTANWENDUNGEN
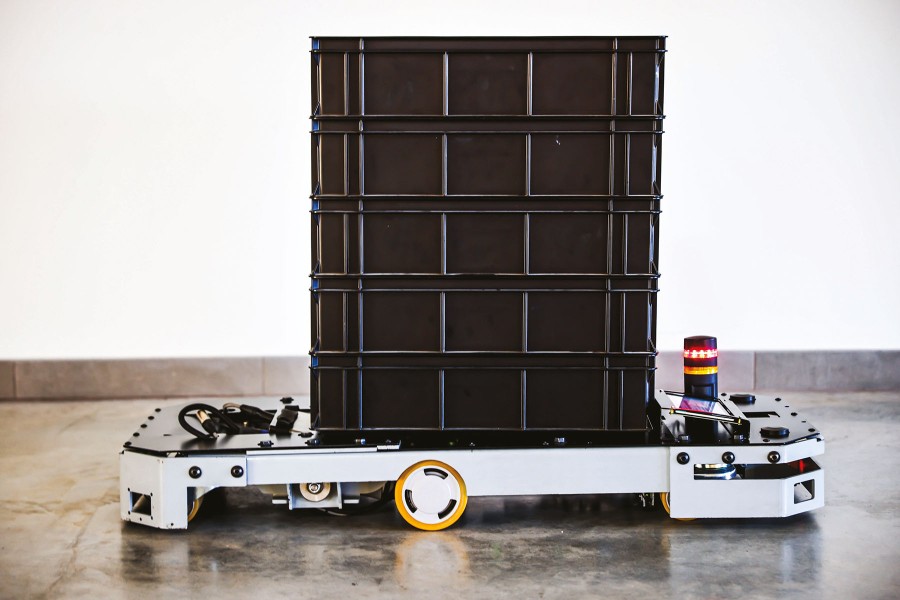
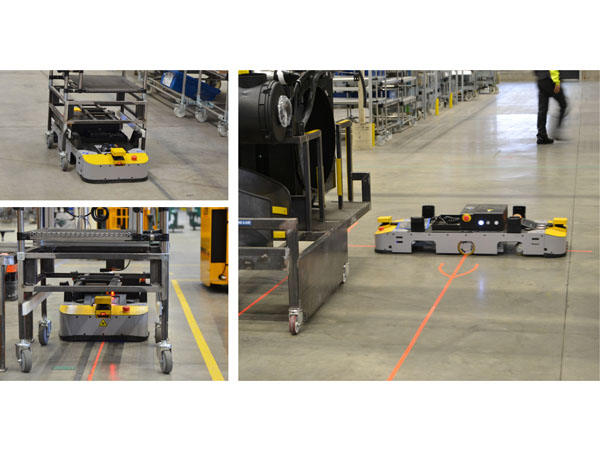
- AGVs und AMRs
- Mobile industrielle Plattformen
- Intralogistische Roboter








STEUERUNG UND KONNEKTIVITÄT
ez-Way® STANDALONE-MANAGER
Mit ez-Way® ausgerüstete Roboter können im Standalone-Modus verwendet werden, wenn kein Flottenmanager erforderlich ist.
- Lokaler Aufgabenmanager und -planer
- Benutzerzugangskontrolle
(ODER) FREMDFLOTTENMANAGEMENT (SERVER)
Mit ez-Way® ausgerüstete Roboter können über jedes beliebige Fremdflottenmanagementsystem gesteuert werden, das die Anforderungen der VDA 5050-Norm erfüllt.
- Verfügbar von mehreren Akteuren
- Unterstützt VDA 5050*
- Geeignet für heterogene AGV-Flotten
ez-Way® STEUERUNG UND NAVIGATION (ROBOTER)
- Hardwaremanagement (Steuerung und Überwachung)
- Lokalisierung und Sensormanagement
- Navigation (geführt, Pfadverfolgung)
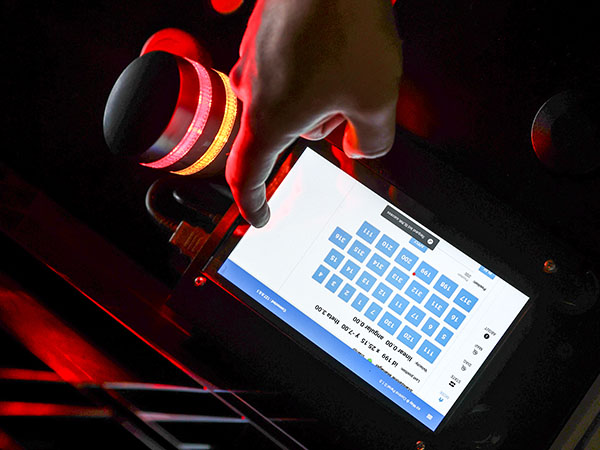
ez-Way® MISSIONSVERWALTUNG
- Missionen und Aufgaben (Bewegen, Laden, Warten...)
- Roboterstatus (Position, Ladezustand, Fehler...)
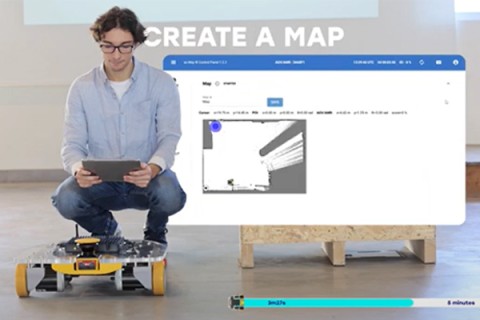
- Karten bearbeiten und benutzerdefinierte Missionen erstellen

*VDA 5050 ist eine Norm für die Verbindung autonomer Fahrzeuge in der Industrie. Sie definiert die Kommunikationsregeln zwischen Robotern und Managementsystemen.
NAVIGATIONSMODI
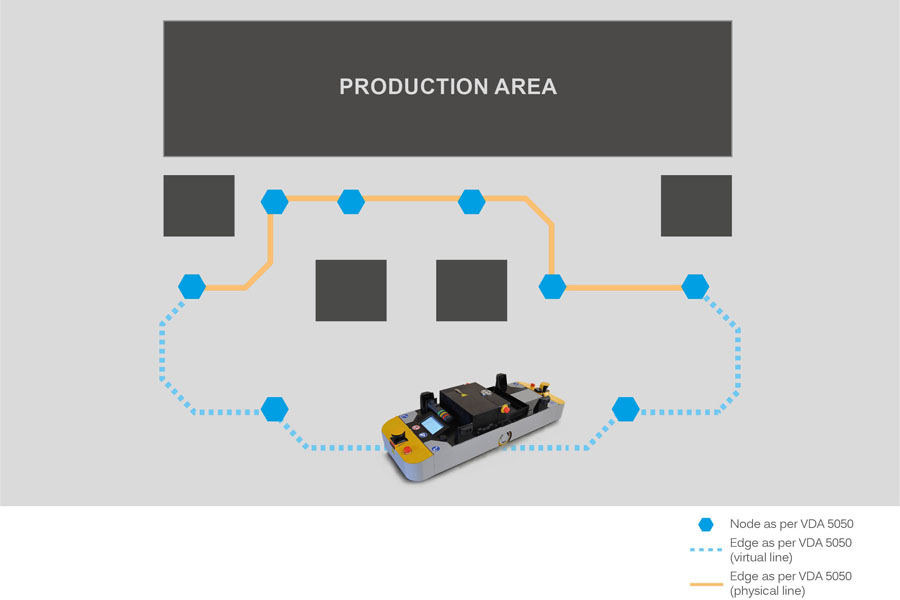
VIRTUELLE LINIENVERFOLGUNG
- Kartenbasierte Navigation
- SLAM-basierte Lokalisierung
- Nutzung von Daten aus Sicherheits-LiDAR-Lösungen
- Von der FMS definierter Pfad
PHYSISCHE LINIENVERFOLGUNG
- Linienverfolgung im EchtzeitmodusMagnetische oder optische Linien und Tags
- Nutzung von Daten dedizierter Sensoren
- Von der FMS definierter Pfad
NAVIGATION MIT MODUSKOMBINATION
- Virtuelle / physische Linienverfolgung
- Kann für jeden Pfad ausgewählt werden
- Nahtlose Integration mehrerer Sensoren
- Von der FMS definierter Pfad
Für spezifische Bedürfnisse können benutzerdefinierte Aktionen definiert werden, um die Funktionen des Roboters an beliebige Anwendungsfälle anzupassen.